Research interests
I am particularly interested in the following open challenges:
Theory:
Traffic flow theory
Control systems
Optimization
Applications:
Impacts of heterogenous vehicle driving behavior
Traffic estimation and control
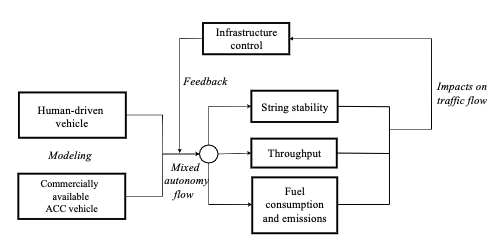
My Ph.D. research mainly includes three parts: 1) developing high-fidelity and physically-interpretable models for AVs and human-driven vehicles to accurately describe vehicle dynamics; 2) exploring the impacts of partially automated vehicles on human-piloted traffic flow, including string stability, highway throughput, and fuel consumption and emissions; 3) designing effective traffic control strategies to account for the influences of mixed autonomy traffic in order to build smart cities. Iteratively, the impacts of the regulated traffic flow are re-evaluated, and the infrastructure control strategy is further developed with advanced control approaches.
Some of my recent works are briefly summarized below.
Developing Physically-interpretable Models for Traffic Flow Dynamic
My research is focused on developing physically-interpretable car following models to accurately describe ACC vehicle dynamics in order to obtain accurate and realistic analysis results on traffic flow characteristics, including stability, highway throughput, fuel consumption and emissions. My contributions include:
Developed accurate and physically interpretable microscopic car-following models to capture the asymmetric driving behavior of commercially available ACC vehicles
Calibrated car following model parameter values with the Vanderbilt ACC car following datasets and utilized the interior-point algorithm to optimize the discrepancy between simulated trajectories and real data
Simulated and conducted model performance comparisons with statistical methods (e.g., F-test) using Matlab
Investigating how commercially available ACC vehicles will impact traffic
Utilizing the accurate microscopic car-following models for ACC vehicles, my research contributes to investigating how commercially available ACC vehicles will impact mixed autonomy traffic with human-piloted vehicles at different market penetration rates. My contributions include:
Conducted analytical and numerical string stability analyses by linearizing the nonlinear ODE for mixed traffic consisting of ACC vehicles and human-driven vehicles
Utilized Simulation of Urban Mobility (SUMO) for highway capacity analysis and employed the Traffic Control Interface (TraCI) in Python to facilitate the simulations
Modeled and estimated the impacts of ACC vehicles on fuel consumption and emissions through simulations conducted in MATLAB
Traffic control in the presence of mixed autonomy traffic
My findings that commercially available ACC vehicles may negatively impact traffic flow motivate me to design next-generation intelligent infrastructure to better adapt to mixed autonomy traffic. My contributions include:
Modeled and simulated synthetic macroscopic on-ramp traffic flow dynamics for mixed autonomy traffic
Proposed and tested an extended ramp metering control strategy aimed at improving the adaptation of mixed autonomy traffic flow
Implemented and simulated the proposed ramp metering strategy on Minnesota highway conjunctions using SUMO